
主页 > 创意作品展示 >
DF论坛上有人发了一篇关于制作“变色龙”的文章,利用RGB全彩LED灯珠或灯带,结合颜色识别传感器,做一个能够根据环境颜色发出不同光芒的“变色龙”。这一作品激起很多创客的兴趣,于是大家就进一步改造,让这个“会变色”的作品越来越好玩。
这类变色主题的作品再多,也无非是利用了颜色传感器,控制的还是REG灯,在我们看来都不够好玩。在研究利用Wi-Fi控制互联网智能灯泡的过程中,我们发现只要遵循一定的协议,控制物联网家电并非难事。于是,本文继续研究用虚谷号来控制Yeelight灯泡,做一个智能变色灯。和其他作品不同的是,我们用摄像头或者高拍仪替代了颜色传感器,并且控制的是220V“真正灯泡”。

DF论坛上的“变色龙”作品
一、作品原理分析
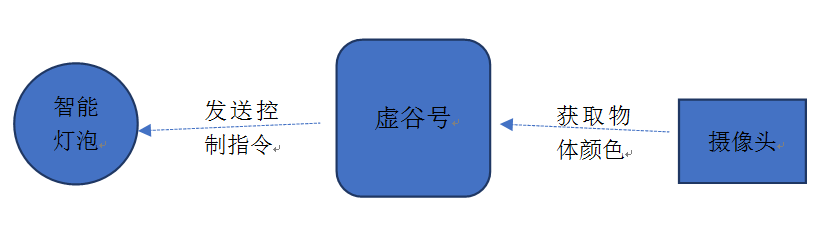
之所以用摄像头来替代颜色传感器,是因为前者不仅便宜,而且随处可以获取。利用摄像头获取颜色,可以借助于Python中OpenCV库,调用摄像头拍照,并对拍到的图像进行处理分析,将图像中的主要颜色分解为RGB三种颜色数值,再通过局域网发送控制指令使智能灯泡变色。
用虚谷号控制智能灯泡的原理,在上一期文章《让创客空间的照明系统个性化起来》中已经详细介绍,这里不再详细介绍。Yeeligh灯泡支持局域网控制,能够接收到局域网内任一智能设备的控制指令,发送控制指令的设备可以是电脑、手机,也可以是任何一个支持网络功能的MCU,如掌控板、虚谷号和树莓派等。
这个智能变色灯需要的器材很少,虚谷号加yeelight智能灯泡、摄像头就可以了,作品的工作流程图如下。
二、用摄像头获取物体颜色的代码实现
摄像头前物体是什么颜色?看起来问题很简单,但是让计算机来回答并不容易。当我们要判断某个物体是什么颜色的时候,往往会先找出这一物体的最主要颜色,再判断这一颜色和哪种颜色最接近。计算机虽然说不出天蓝、橘黄之类的色彩名词,但可以精确地分析出图像中某一个像素点的RGB值,即RGB三种颜色的具体组成,但一个物体往往不会是纯色的,所以要确定一张含有多种颜色的图像的“颜色”,需要确定一个算法。
算法一:将这个图像的所有像素点的RGB值分别相加,取出RGB三种颜色的平均值。如果担心计算的效率太低,可以均匀地取出部分像素,应该可以得到大致的颜色平均值。
算法二:利用滤镜功能,给这个图像加上RGB三种颜色遮罩,处理为黑白图片,然后通过计算分别得到图像的白色区域面积大小,换算为0-255之间的数值。
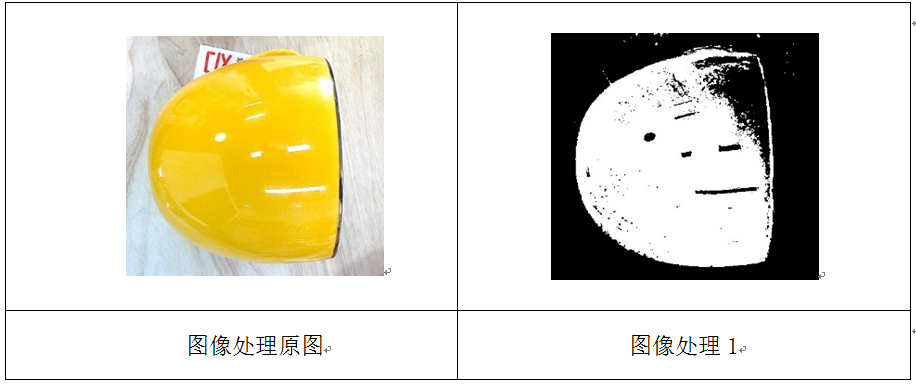
其实,这两种算法的原理是差不多的,只不过实现的方式不一样。OpenCV库作为著名的跨平台计算机视觉库,提供了很多图像处理和计算机视觉方面的通用算法,可以很简单地帮我们完成颜色分析的功能。核心代码如下:
三、虚谷号控制物联网灯泡的代码实现
为方便用户控制灯泡,Yeelight公司提供的一个小型库,可让用户通过Wi-Fi发送指令来控制Yeelight灯泡。只要获取了设备的IP地址,通过ON、OFF、Set_Color等简单的函数,就能调整灯泡的开关、颜色、亮度等参数。
需要强调的是,Yeelight灯泡要开启“局域网控制”功能,默认情况下这一功能是关闭的。另外,虚谷号和Yeelight灯泡一定要处于同一局域网,即连接同一个无线路由器,才能通过指令来找到设备的IP地址。
控制灯泡颜色的参考代码如下:
我们在虚谷号的论坛中,提供了更多关于Yeelight库的教程,地址如下:
http://vvboard.net.cn/bbs/
四、作品测试
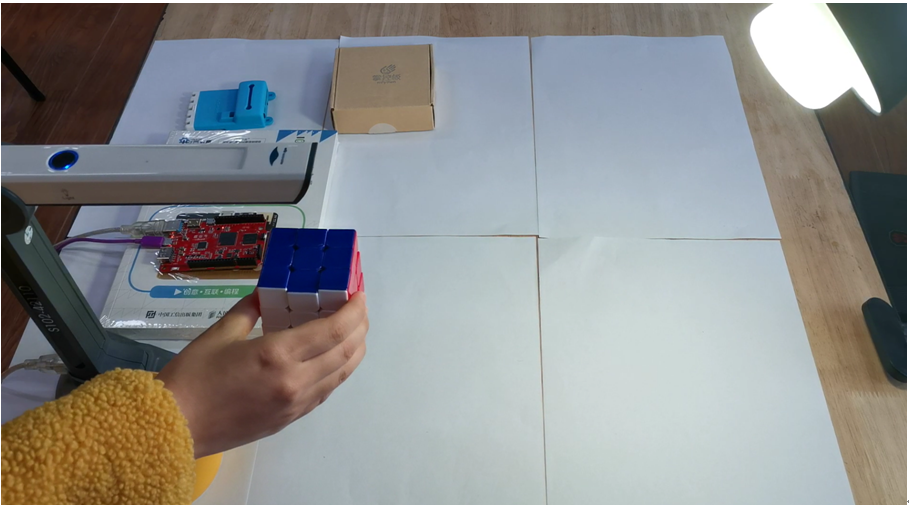
为了让获取的物体颜色更加准确,我们用高拍仪替代了普通摄像头。因为高拍仪一般都自带了用来补光的LED灯,可以避免色差。虚谷号支持绝大多数的免驱摄像头和高拍仪,能够做到即插即用。我们使用的高拍仪是良田的S系列。
作品的演示效果如下图。默认情况下灯光是白色的,当在高拍仪下面放置不同的物体,灯光则会变成物体的颜色,识别速度很快。如果加上语音提示功能,这个作品就更加吸引人了。
从这个作品可以看出,借助Python的OpenCV库,摄像头获取物体颜色非常方便,代码简单易懂。开源硬件虚谷号,不仅能够用来编写Arduino、Python、Processing等应用,也可以用来做视觉识别、语言识别之类的人工智能应用。在制作这个作品的时候,我们并不需要给虚谷号接上显示器和鼠标、键盘,只需要把在电脑中调试成功的Python代码,复制到虚谷号的U盘中就可以正常执行,大大降低了应用门槛。
本文为2018 年度温州市中小学校科技创新项目《<物联网与科学探究创意实验>课程的开发》的阶段性成果,项目编号:2018ZXX01。
虚谷号结合摄像头制作智能变色灯
2019-03-29 16:09
点击:156
虚谷号结合摄像头制作智能变色灯
浙江省温州中学 谢作如
温州大学教师教育学院 林淼焱
涉及学科:物理、技术、艺术浙江省温州中学 谢作如
温州大学教师教育学院 林淼焱
DF论坛上有人发了一篇关于制作“变色龙”的文章,利用RGB全彩LED灯珠或灯带,结合颜色识别传感器,做一个能够根据环境颜色发出不同光芒的“变色龙”。这一作品激起很多创客的兴趣,于是大家就进一步改造,让这个“会变色”的作品越来越好玩。
这类变色主题的作品再多,也无非是利用了颜色传感器,控制的还是REG灯,在我们看来都不够好玩。在研究利用Wi-Fi控制互联网智能灯泡的过程中,我们发现只要遵循一定的协议,控制物联网家电并非难事。于是,本文继续研究用虚谷号来控制Yeelight灯泡,做一个智能变色灯。和其他作品不同的是,我们用摄像头或者高拍仪替代了颜色传感器,并且控制的是220V“真正灯泡”。
DF论坛上的“变色龙”作品
之所以用摄像头来替代颜色传感器,是因为前者不仅便宜,而且随处可以获取。利用摄像头获取颜色,可以借助于Python中OpenCV库,调用摄像头拍照,并对拍到的图像进行处理分析,将图像中的主要颜色分解为RGB三种颜色数值,再通过局域网发送控制指令使智能灯泡变色。
用虚谷号控制智能灯泡的原理,在上一期文章《让创客空间的照明系统个性化起来》中已经详细介绍,这里不再详细介绍。Yeeligh灯泡支持局域网控制,能够接收到局域网内任一智能设备的控制指令,发送控制指令的设备可以是电脑、手机,也可以是任何一个支持网络功能的MCU,如掌控板、虚谷号和树莓派等。
这个智能变色灯需要的器材很少,虚谷号加yeelight智能灯泡、摄像头就可以了,作品的工作流程图如下。
智能灯泡的工作流程图
二、用摄像头获取物体颜色的代码实现
摄像头前物体是什么颜色?看起来问题很简单,但是让计算机来回答并不容易。当我们要判断某个物体是什么颜色的时候,往往会先找出这一物体的最主要颜色,再判断这一颜色和哪种颜色最接近。计算机虽然说不出天蓝、橘黄之类的色彩名词,但可以精确地分析出图像中某一个像素点的RGB值,即RGB三种颜色的具体组成,但一个物体往往不会是纯色的,所以要确定一张含有多种颜色的图像的“颜色”,需要确定一个算法。
算法一:将这个图像的所有像素点的RGB值分别相加,取出RGB三种颜色的平均值。如果担心计算的效率太低,可以均匀地取出部分像素,应该可以得到大致的颜色平均值。
算法二:利用滤镜功能,给这个图像加上RGB三种颜色遮罩,处理为黑白图片,然后通过计算分别得到图像的白色区域面积大小,换算为0-255之间的数值。
其实,这两种算法的原理是差不多的,只不过实现的方式不一样。OpenCV库作为著名的跨平台计算机视觉库,提供了很多图像处理和计算机视觉方面的通用算法,可以很简单地帮我们完成颜色分析的功能。核心代码如下:
|
def get_pic():#调用摄像头拍摄图像 cap=cv2.VideoCapture(0) sucess,img=cap.read() cv2.imwrite("CachePhoto/image.jpg",img) cap.release() def get_color(frame):#处理图像,返回颜色值 maxsum = -100 color = None #将RGB图像转化为HSV图像,HSV空间比在BGR空间中更容易表示一个特定的颜色 hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) #导入预设的颜色字典,即RGB三种颜色 color_dict = colorList.getColorList() #遍历颜色字典,选取不同的颜色来与原图进行比较 for d in color_dict: #为当前颜色添加遮罩,变成白色,其他颜色变成黑色 mask = cv2.inRange(hsv, color_dict[d][0], color_dict[d][1]) #将这张黑白照片存入本地以便调试查看 cv2.imwrite('CachePhoto/' + d +'.jpg', mask) #为了保证图像的质量,对这张黑白照片进行降噪处理,凸显轮廓 binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1] binary = cv2.dilate(binary, None, iterations=2) #寻找轮廓函数,使用countours得到每张图像白色部分的面积 img, countours, hierarchy = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) sum = 0 # cv2.contourArea()用于计算轮廓的面积,我们用它在代表不同颜色的许多图像中,找到白色轮廓面积最大的图像 for cnts in countours: sum += cv2.contourArea(cnts) if sum >maxsum: maxsum = sum color = d return color |
三、虚谷号控制物联网灯泡的代码实现
为方便用户控制灯泡,Yeelight公司提供的一个小型库,可让用户通过Wi-Fi发送指令来控制Yeelight灯泡。只要获取了设备的IP地址,通过ON、OFF、Set_Color等简单的函数,就能调整灯泡的开关、颜色、亮度等参数。
需要强调的是,Yeelight灯泡要开启“局域网控制”功能,默认情况下这一功能是关闭的。另外,虚谷号和Yeelight灯泡一定要处于同一局域网,即连接同一个无线路由器,才能通过指令来找到设备的IP地址。
控制灯泡颜色的参考代码如下:
|
#从yeelight库中导入Bulb类 from yeelight import Bulb #实例化Bulb类,灯泡的IP地址为192.168.31.39 bulb = Bulb("192.168.31.39") #yeelight特定函数:开启灯泡 bulb.turn_on() #yeelight特定函数:通过设置不同的RGB值设置灯光颜色 bulb.set_rgb(red,green,blue) |
我们在虚谷号的论坛中,提供了更多关于Yeelight库的教程,地址如下:
http://vvboard.net.cn/bbs/
四、作品测试
为了让获取的物体颜色更加准确,我们用高拍仪替代了普通摄像头。因为高拍仪一般都自带了用来补光的LED灯,可以避免色差。虚谷号支持绝大多数的免驱摄像头和高拍仪,能够做到即插即用。我们使用的高拍仪是良田的S系列。
作品的演示效果如下图。默认情况下灯光是白色的,当在高拍仪下面放置不同的物体,灯光则会变成物体的颜色,识别速度很快。如果加上语音提示功能,这个作品就更加吸引人了。
本文为2018 年度温州市中小学校科技创新项目《<物联网与科学探究创意实验>课程的开发》的阶段性成果,项目编号:2018ZXX01。
热门新闻
用虚谷号做个“小胖”机器人2019-07-24 01:11:35
虚谷号结合摄像头制作智能变色灯
2019-03-29 16:09:46
虚谷号结合百度语音实现语音控制
2019-07-12 00:06:39

